
 El proyecto europeo MAINBOT, correspondiente al Séptimo Programa Marco de la Unión Europea, en el que participaba Tecnatom ha finalizado con resultados muy satisfactorios. El objetivo de dicho proyecto consistía en desarrollar robots de servicios versátiles, capaces de realizar de manera autónoma y operados remotamente, distintas tareas de mantenimiento e inspección mediante Ensayos no Destructivos (ENDs) en centrales termosolares. El consorcio, liderado por IK4-Tekniker, ha contado con la colaboración de ROBOSOFT (Francia), Fraunhofer- IFF (Alemania), Tecnatom y Torresol.
El proyecto europeo MAINBOT, correspondiente al Séptimo Programa Marco de la Unión Europea, en el que participaba Tecnatom ha finalizado con resultados muy satisfactorios. El objetivo de dicho proyecto consistía en desarrollar robots de servicios versátiles, capaces de realizar de manera autónoma y operados remotamente, distintas tareas de mantenimiento e inspección mediante Ensayos no Destructivos (ENDs) en centrales termosolares. El consorcio, liderado por IK4-Tekniker, ha contado con la colaboración de ROBOSOFT (Francia), Fraunhofer- IFF (Alemania), Tecnatom y Torresol.
Como resultado de esta colaboración, han sido diseñados dos tipos de robots para cubrir alguna de las áreas de inspección requeridas:
- Un robot terrestre que opera en plantas de concentración de espejos cilindro-parabólicos y que realiza tanto medidas de reflectometría sobre los espejos como detección de pérdida de vacío en las líneas de tubos absorbedores o identificación de espejos rotos del campo solar mediante termografía infrarroja.
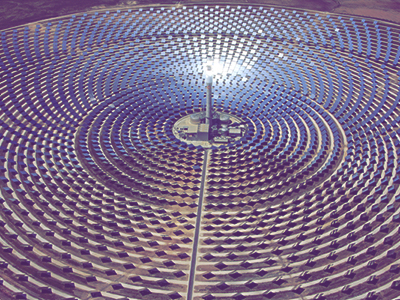
- Un robot trepador especializado en la inspección de los tubos del receptor en centrales tipo torre central, como Gemasolar (Sevilla). Dicho robot, que ha sido diseñado por IFF y Tecnatom, ha embarcado la electrónica y sensores para realizar la inspección. Asimismo, Tecnatom ha desarrollado el Software de comunicación con el robot y de adquisición y evaluación de los datos END, con extracción automática de defectos.El robot ha sido validado sobre una maqueta del receptor instalada en IFF, con resultados prometedores.
Otra de las innovaciones, incorporadas en estos sistemas, ha sido el desarrollo por Tekniker, de la interfaz Web que permite el seguimiento de la operación desde cualquier parte del mundo.




