
TECNATOM y FADA-CATEC abrieron una línea de colaboración tecnológica destinada a la mejora de los equipos de inspección mecánicos sustituyéndolos por equipos de posicionamiento inalámbrico. El ejemplo más reciente de esta colaboración ha sido el proyecto WiiPa, que sustituye por completo la interacción con cualquier equipo mecánico para las inspecciones manuales de distintas naturaleza UT o ET, con precisiones altamente competitivas y características muy positivas en el ámbito de las inspecciones en los distintos procesos de las fábricas.
La principal ventaja de este sistema es la eliminación del equipo mecánico necesario para inspecciones, reduciendo los costes y ampliando la gama de componentes a inspeccionar.
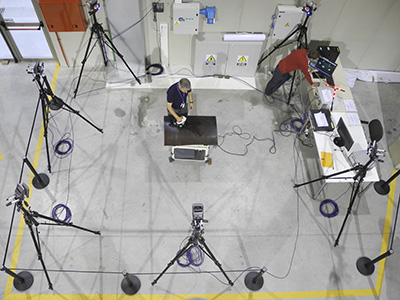
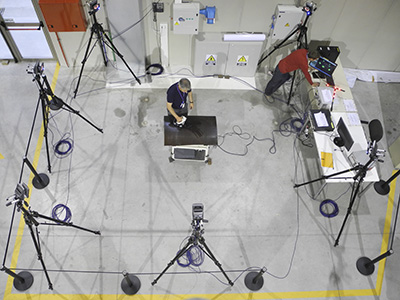
El diseño de este equipo gira alrededor de la técnica de captura de movimiento mediante cámaras infrarrojas. El sistema se basa en una triangulación en el espacio de trabajo, lo que elimina las limitaciones geométricas de inspección de algunas piezas puesto que los equipos de adquisición de posición se pueden situar de forma particular para cada pieza, aumentando la eficiencia y superando las limitaciones geométricas que padecen otras tecnologías.
Con este nuevo sistema Tecnatom brinda unas capacidades de innovación en múltiples sectores, puesto que este sistema de posicionamiento inalámbrico puede ser empleado en todo tipo de aplicaciones donde se requiera un posicionamiento preciso sin tener que recurrir a manipuladores mecánicos.
TECNATOM y FADA-CATEC abrieron una línea de colaboración tecnológica destinada a la mejora de los equipos de inspección mecánicos sustituyéndolos por equipos de posicionamiento inalámbrico. El ejemplo más reciente de esta colaboración ha sido el proyecto WiiPa, que sustituye por completo la interacción con cualquier equipo mecánico para las inspecciones manuales de distintas naturaleza UT o ET, con precisiones altamente competitivas y características muy positivas en el ámbito de las inspecciones en los distintos procesos de las fábricas.
La principal ventaja de este sistema es la eliminación del equipo mecánico necesario para inspecciones, reduciendo los costes y ampliando la gama de componentes a inspeccionar.
El diseño de este equipo gira alrededor de la técnica de captura de movimiento mediante cámaras infrarrojas. El sistema se basa en una triangulación en el espacio de trabajo, lo que elimina las limitaciones geométricas de inspección de algunas piezas puesto que los equipos de adquisición de posición se pueden situar de forma particular para cada pieza, aumentando la eficiencia y superando las limitaciones geométricas que padecen otras tecnologías.
Con este nuevo sistema Tecnatom brinda unas capacidades de innovación en múltiples sectores, puesto que este sistema de posicionamiento inalámbrico puede ser empleado en todo tipo de aplicaciones donde se requiera un posicionamiento preciso sin tener que recurrir a manipuladores mecánicos.



